发布日期: 2023/01/12 09:29
本项目实现自动跟随采用了新的设计思路,D1-H哪吒开发板负责主控的工作做,自动跟随功能由UWB模块来实现,D1-H哪吒开发板会收集蓝牙模块、GPS模块以及ADXL345模块作为下位机提供的数据消息,并反馈到GPS模块和WiFi模块上,最后交由WiFi模块通过阿里云与上位机进行通信并反馈信息到终端的APP上显示。
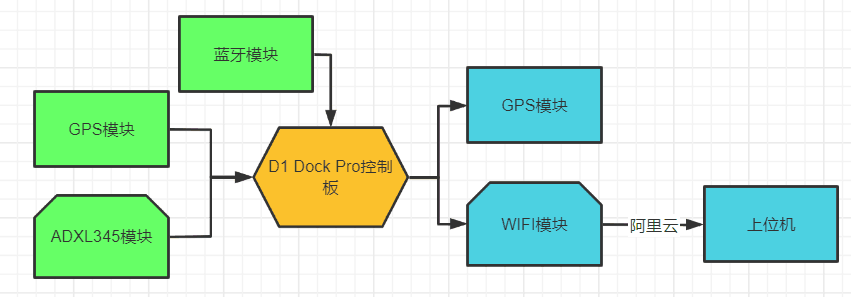
系统架构图
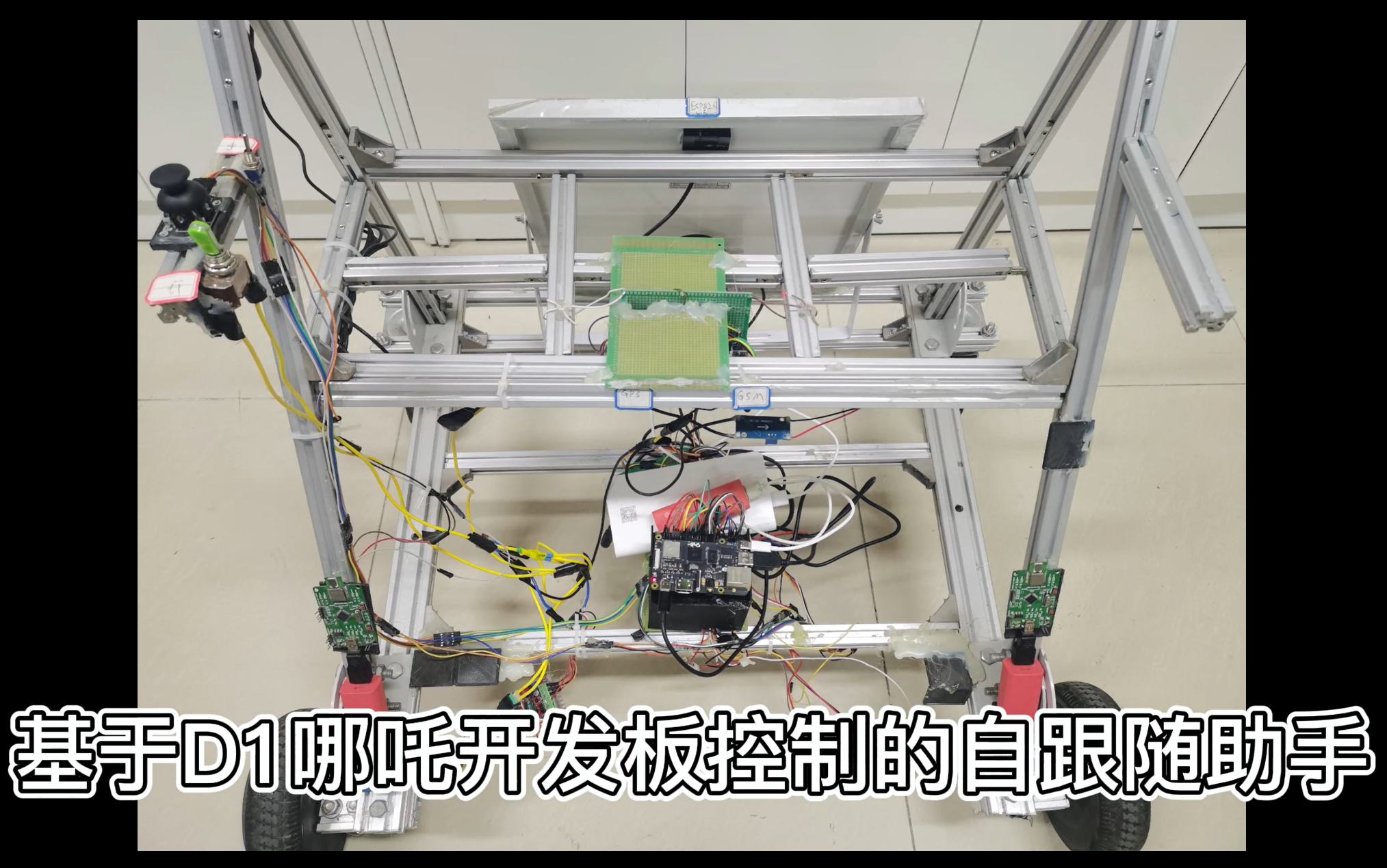
实物图
PART01 关键性能指标
(1)自动跟随功能,基于D1-H哪吒控制的自跟随助手,通过UWB模块,来实现自动跟随的功能。

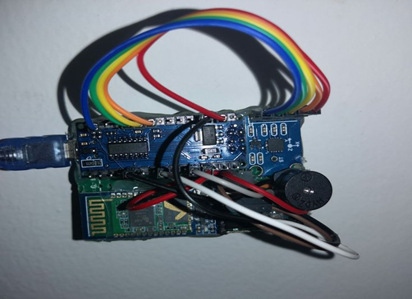
主控板连线图
(2)检测意外摔倒并报警的功能物联网信息传输功能,配套的手环具有检测意外跌倒并报警的功能,并且通过主体将老人的状态信息,和位置信息上传到阿里云,然后向手机实时上传,老人的状态信息和位置信息,可以通过手机APP实时进行查看,当老人站起或者系统检测跌倒信息错误时,使用者可以通过按下手环上的手持终端按键,来关闭报警声音,同时手机APP实时更新老人的状态信息和位置信息。
手环实物图

物联网信息传输功能测试
(3)PWN助力系统通过摇杆开关,功能转换开关,进行UWB自动跟随功能和助力功能两种功能模式之间的切换,可通过助行器上的摇杆开关来控制电机向相应的方向工作运行从而实现助力功能。

PWM系统摇杆开关
PART02 工作原理
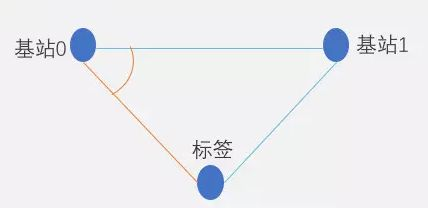
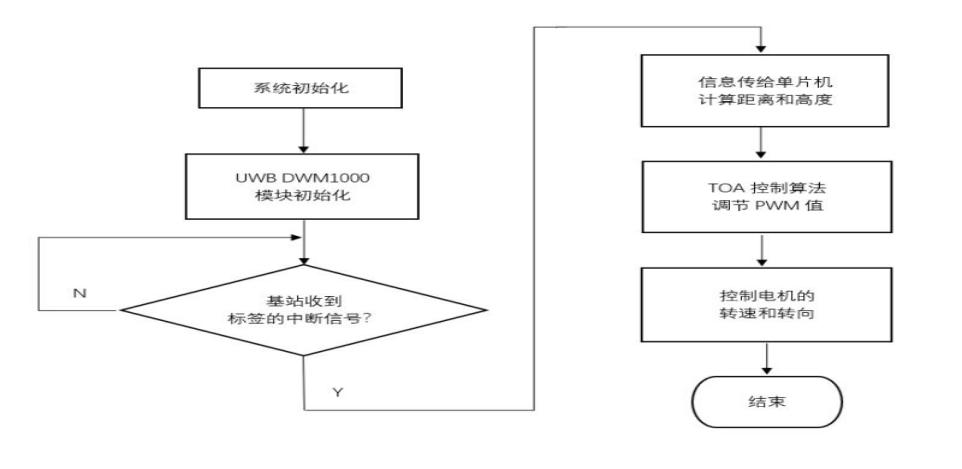
用于以D1-H哪吒作为主控的自跟随助手的跌倒紧急报警智能装置使用三块UWB模块,两块装在助行器机身,另外一块安置在配套的手环内。使用者将用于智慧家居的跌倒紧急报警智能装置上的两个UWB基站和UWB标签通上电并且打开开关后,UWB标签发射无线信号,安装在箱体上的两个UWB基站接收到信号后,计算出与UWB标签之间的距离及角度,单片机对距离及角度进行处理,然后单片机发出指令控制电机向相应的方向工作运行,从而实现跟随功能。
UWB模块放置图
用于以D1-H哪吒作为主控的自跟随助手的跌倒紧急报警智能装置可以实现助力功能,以减轻使用者的负担。主要实现方法是,当使用者切换至助力模式后,助行器启用助力功能,使用者手扶着助行器行走时,可以通过助行器上的摇杆开关来调节电机的转速和工作方向,以此来实现电机转速的实时调节,从而减轻使用者的负担,达到省力的目的。以此来实现转速的实时调节。
UWB模块配合图
PART03 参赛团队
山东华宇工学院“实践队”