发布日期: 2023/01/12 09:04

项目演示
基于D1 Dock Pro控制的沙漠树种移植车演示视频.mp4
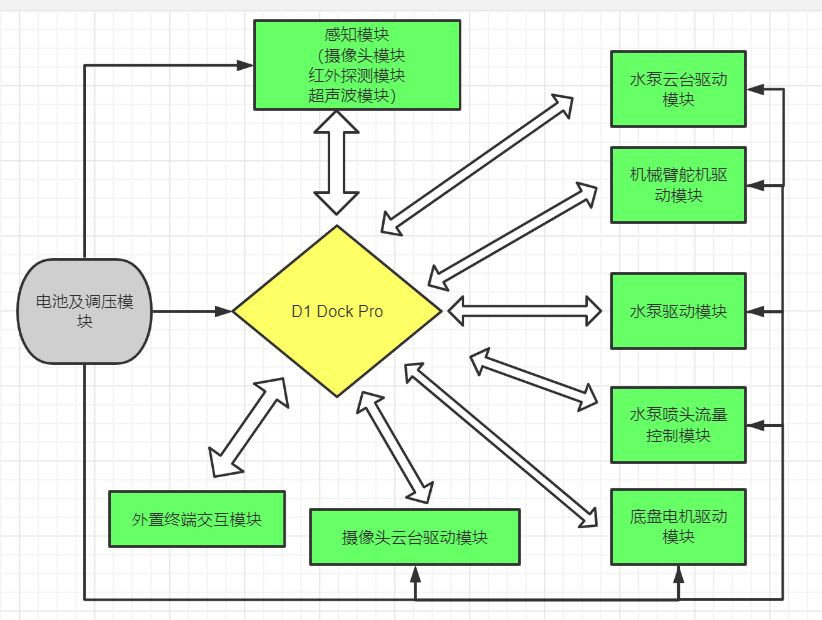
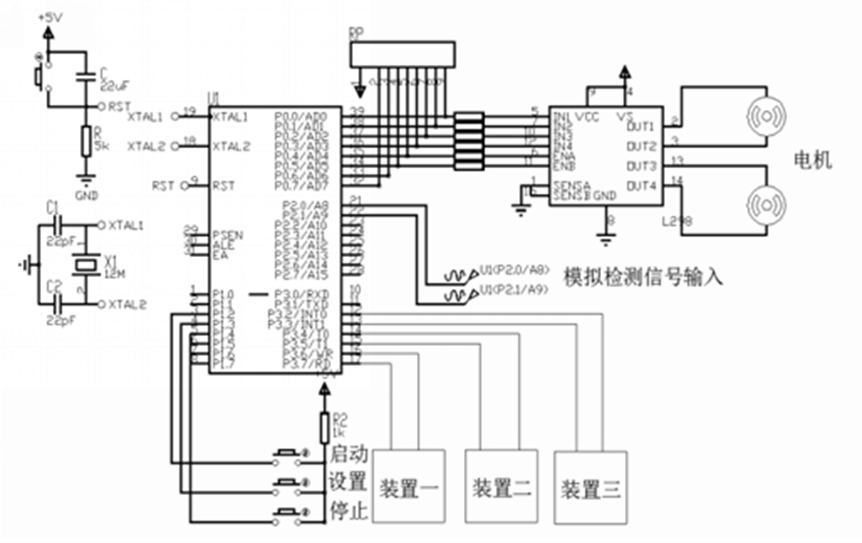
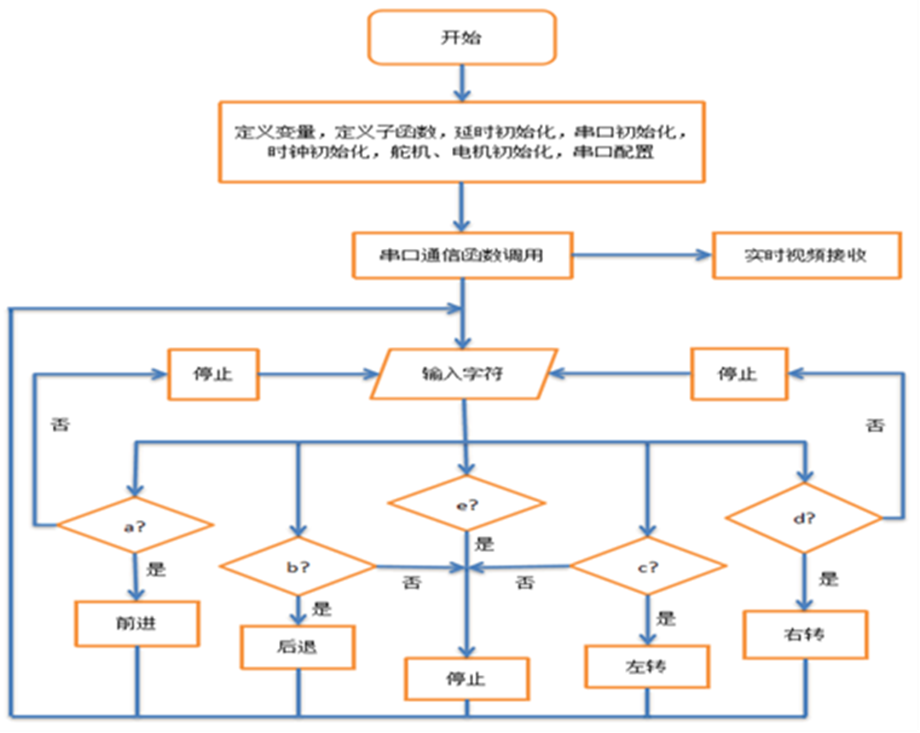
项目以电能为主要能源,电池及调压模块组合实现对设备各处模块的稳定供电,摄像头模块、红外探测模块、超声波模块将信号传递给D1-H哪吒控制板,控制板将收到的现场信号传递给外置终端交互模块,人员通过外置终端交互模块将指令传递给D1-H哪吒开发板,开发板将指令进行编译并将控制信号传递给其他模块,控制其他驱动模块完成动作,以完成对车体、机械臂、水泵、摄像头云台与水泵云台的动作控制。
主要技术特点
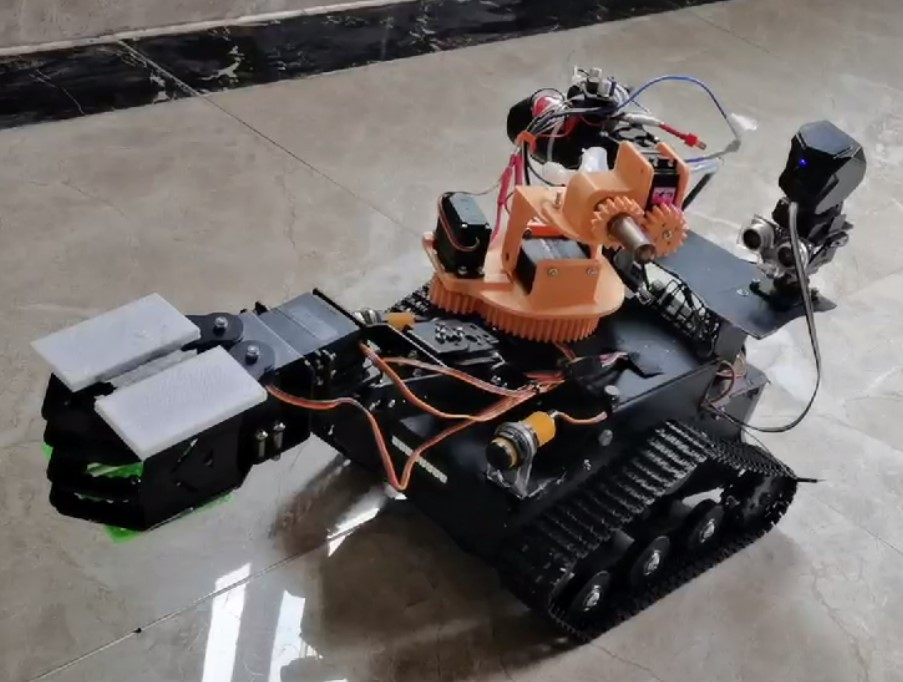
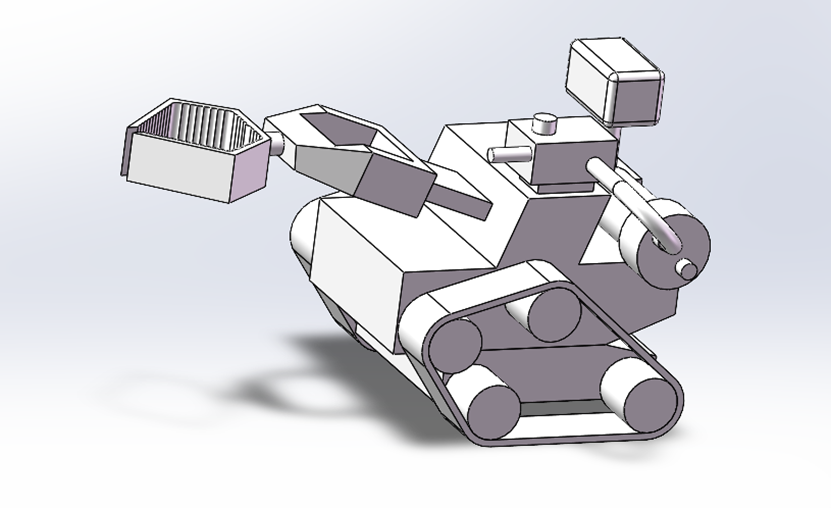
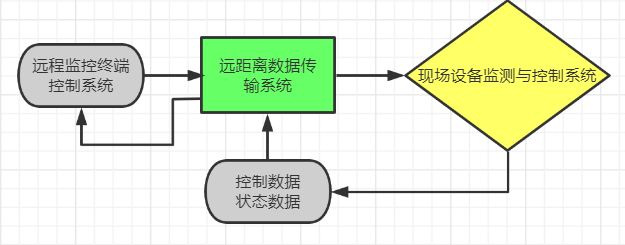
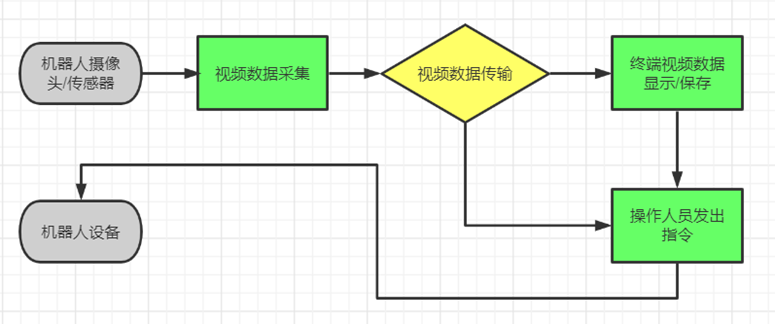
本设备应用D1-H 哪吒作为主控芯片,并通过外置终端进行远程遥控,精度高。摄像头与wifi模块对移植现场进行实时同步情景传输,通过HC-SR04测距回传,可以在终端实时显示小车与障碍物的距离,方便控制,转移时可通过红外探头实时红外追踪,可精准的检测人的位置,实现红外追踪方便车体转移。采用履带式底盘适应沙漠地形,终端可实时操控机械臂抓取树种,控制水炮装置实现可控制的灌溉,同时也可以进行后期维护工作如:喷白漆。实现了树种移植、维护场景的实时、准确的转播。设备采用电能作为主要能源,减少对不可再生能源的使用,同时在沙漠中可通过光伏板发电获取电能。
主要创新点
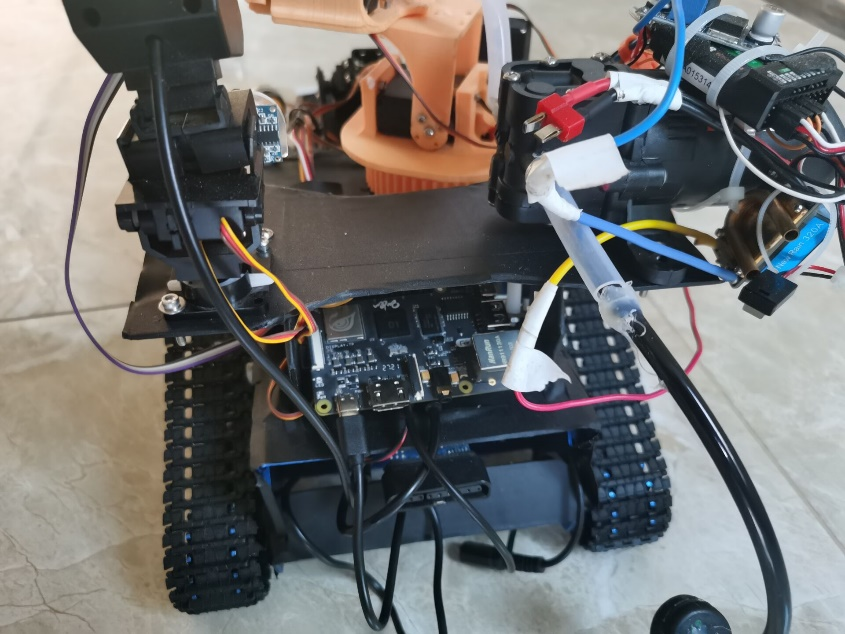
(1)使用D1-H哪吒作为主控芯片,采用外置终端来进行远程遥控,实现了高精度,较低成本的控制。
(2)利用红外探头进行红外追踪可精准的检测人的位置,实现了回收设备时的快速转移。减少了人工参与的程度。超声波测距技术的利用可以使设备在移动的过程中减少操作难度。
(3)摄像头与wifi模块配合对移植现场进行实时同步情景传输,超声波模块精确测距的反馈保障人工判断的准确性。
(4)可调式国标喷头与舵机相啮合的设计,便于喷头快速更换和实现一定角度内可调、定量的灌溉,通过舵机旋转的底盘更保障了旋转操控的精准度。
参赛团队
山东华宇工学院“鑫悦队”